

Erst habe ich den gesamten Boden der Backskiste mit drei Lagen Glasfaser verstärkt. Dann mit Faserspachtel den Flansch eingesetzt, sodass er Unten bündig mit dem Schiffsbauch ist. Die Seiten sind großzügig mit Faserspachtel nach Außen abnehmend verspachtelt und nochmal mit paar Lagen Glasfaser abgedeckt. Damit wird der Boden zunehmend ausgesteift, bis er praktisch in den Flansch übergeht. Damit sollte es keine Verformungen mehr im Übergangsbereich GFK-Rumpf – ABS-Flansch geben.

Der Schacht ist auch aus ABS gefräst und mit paar Bahnen Glasfaser Außen verstärkt, hauptsächlich um ihn robust zu machen gegen rumfliegende Gepäckstücke. Fürs Erste hebe ich den Motor mit einem kleinen Flaschenzug, der aus dem Cockpit heraus bedient werden kann. Da es sich angeboten hat, ist der Motor sogar lenkbar, wenn auch im Moment nur von Hand. Aber immerhin gibt’s die Möglichkeit. Und wenn sich das ganze bewährt, kommt da mal noch ein kleines Lenkservo dran.



Autopilot
Ich hatte einen Pinnenpilot ST1000 gekauft. Einiges finde ich nicht gut gemacht an der Lösung, den an Deck an die Pinne zu koppeln. Es fehlen Endschalter, wenn die Seewelle von hinten kommt. Zwangsweise wird er irgendwann an seinen mechanischen Anschlag kommen und drückt sich fast selbst kaputt. Außerdem verschattet er meine Solarzellen. Auch das Ein- und Aushängen finde ich keine schöne Lösung.
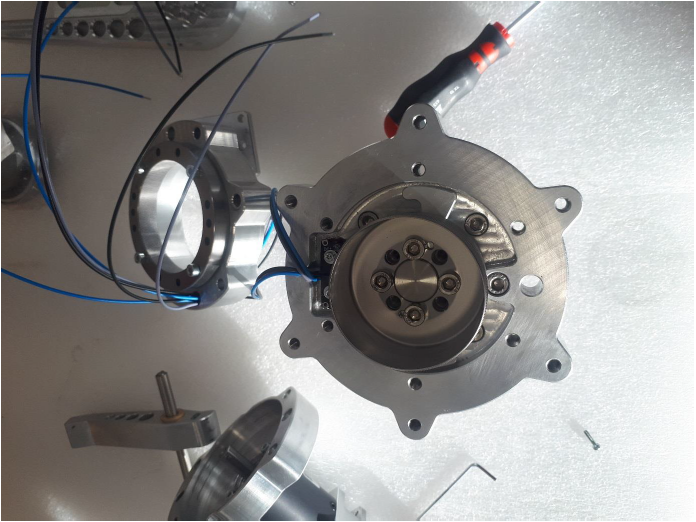
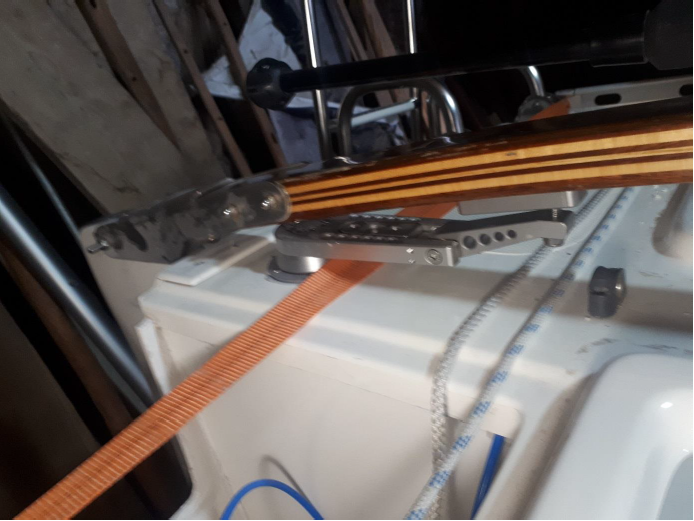
Ich habe von dem Pinnenpilot nur die Elektronik verwendet. Eine Dreheinheit mit hoch untersetztem Getriebe und mit Endschaltern gebaut und eine Drehdurchführung ein Stück vor der Ruderlagerachse angebracht. Damit sitzt die ganze Technik in der Backskiste und ich habe an Deck nur einen kleinen Arm, der per Kugelstück in einer kleinen Schiene unten am Pinnenarm die Steuerung übernehmen kann. Wenn man per Autopilot fährt und ein Gefühl für Ruderdruck bekommen will oder schnell selbst steuern will, muss man nur die Pinne anheben. Die Endschalter lassen sich integrieren, ohne tiefer in die Steuerung einzugreifen. Man benutzt Öffner und schaltet über jeden Endschalter eine Diode. Damit hält der Motor beim Erreichen der Endlage an, kann aber durch die Diode in die andere Richtung fahren. Also auch der klassische Pinnenpilot lässt sich da einfach nachrüsten.

Gesteuert wurde der Autopilot von der alten Steuerelektronik vom ST1000, die ich zusammen mit dem Motorgashebel in einen Einbaukasten in die hintere Cockpitwand eingebaut habe. Allerdings hat sich beim Probeschlag in Wiesbaden gezeigt, dass ich wohl etwas grob mit dem Fluxgate-Kompass umgegangen bin. Das Ding hat bei manchen Richtungen total gesponnen. Da ich da keine Wackellösung brauchen konnte, bin ich umgestiegen auf den EV100. Habe die Heckeinbaukiste umkonstruiert und die einiges bessere Steuerung verbaut. Neu auch zum Umschalten von meinem Antrieb auf den etwas schnelleren Originalantrieb, falls ich mit dem Eigenen irgendwie Probleme kriegen sollte.
Es hat sich aber gezeigt, dass der tadellos funktioniert. Den originalen Teleskopantrieb im Einhandbetrieb einzuhängen fand ich, vor allem wenn er auf der Leeseite lag, total unpraktikabel. Ich werde diesen Winter versuchen, den eigenen Antrieb mit neuer Getriebeabstimmung und etwas stärkerem Motor noch ein bisschen schneller zu bekommen. Vielleicht werde ich sogar noch einen Ruderlagegeber installieren.

Als Plotter hatte ich erst Navionics auf einem iPad. Ich fand das aber nicht schlechtwettertauglich. Ich habe einen richtigen, in den Niedergang schwenkbaren Plotter angebracht, der auch noch Handsteuerung hat. Außerdem kann er die AIS Signale der Funke darstellen. Das obere Schott habe ich aus Makrolon gefräst, damit kann man auch was sehen, wenn man alle Schotten dicht hat.

Stromversorgung
Alles wird von der 24V Torqueedo-Batterie versorgt. Die hat so eine hohe Kapazität, da fände ich es Quatsch, noch ein 12V Akku daneben zu packen. Leider für mich zu spät haben die ein neuen Typen, gleiches Gehäuse aber ca. 30% mehr Kapazität, seit 2019 rausgebracht. Das 12V Bordnetz wird per 20 A Spannungsregler versorgt.
Ich wollte zur Stromerzeugung immer ein kleines Windrad. Aber es gibt nicht viel Vernünftiges oder die haben gleich einen Rotordurchmesser von 1m oder mehr. Das ist irgendwie nicht das richtige Format für eine Shark. Ich setze auf Sonne und habe auf Backskiste, Schiebeluk und vor das Schiebeluk vier Paneele mit insgesamt 250 Watt aufgeklebt. Die sind alle parallelgeschaltet und per Diode gesichert, da meist ein Panel zu stark verschattet ist. Außerdem kann man jedes Panel abschalten, da doch ein ordentlicher Ladestrom zustande kommt, den man vielleicht nicht haben will, wenn man das Boot alleine lässt. Ich will so weit wie möglich landstromunabhängig bleiben und für Hafenmanöver und den normalen Stromverbrauch von Autopilot, Licht, Funke und Navi funktioniert das wunderbar.
Jetzt ist genug gebastelt und gefroren… „merle“ steht startklar und am 1.4. geht’s bei Bodo Günther in den Rhein zum bissle Probesegeln, den neuen Autopiloten testen und überhaupt schauen, ob sie schwimmt. Dann hole ich sie Mitte Mai und es geht an die Ostsee, diesmal will ich an die norwegische Küste und vielleicht nach Shetland rüber…